运行 Ubuntu 的 Husarion CORE2-ROS 使得机器人开发变得容易
这是游客投稿的本系列两篇中的第一篇;作者:Dominik Nowak,Husarion 的 CEO
过去十年,我们见证了 IT 行业的许多突破。可以说对消费者最有意义的一个方面是智能手机和移动开发的普及。接下来的大事件是什么,现在智能手机是如此常见,我们天天对着它,是不是有点无聊吗?所以,我们猜是:机器人。
众所周知,许多生产线完全由机器人运行。但在消费者和服务方面,还没有看到巨大的突破。我们认为这是一个可达性和降低开发人员进入的门槛的问题。只需要有好的、简单的工具来快速做出原型和开发机器人。为了测试新的想法并赋予工程师们更多能力,以便他们可以解决许多人类仍然面临的问题,那些比在应用中的点按一下更棘手的问题。
构建机器人是一个具有挑战性的任务,Husarion 团队正在努力使其更容易。Husarion 是一家从事于机器人快速开发平台的机器人公司。该公司的产品是 CORE2 机器人控制器和用于管理所有基于 CORE2 的机器人的云平台。CORE2 是第二代 Husarion 机器人控制器,它可在这里找到。
CORE2 结合了实时微控制器板和运行 Ubuntu 的单板计算机。Ubuntu 是最受欢迎的 Linux 发行版,不仅适用于桌面,还适用于物联网和 机器人程序中的嵌入式硬件。
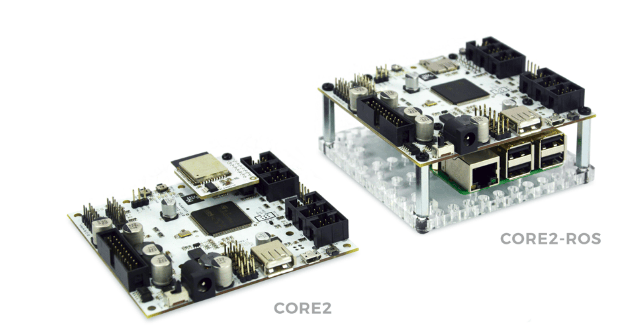
CORE2 控制器有两种配置。第一款是采用 ESP32 Wi-Fi 模块的,专用于需要低功耗和实时、安全遥控的机器人应用。第二款,称为 CORE2-ROS,基本上是将两块板子集成到了一起:
- 使用实时操作系统(RTOS)的实时微控制器并集成电机、编码器和传感器接口的电路板
- 带有 ROS(Robot Operating System)包的运行 Linux 的单板计算机(SBC)和其他软件工具。
“实时”电路板做底层工作。它包含高效的 STM32F4 系列微控制器,非常适用于驱动电机、读码器、与传感器通信,并控制整个机电或机器人系统。在大多数应用中,CPU 负载不超过几个百分点,实时操作由基于 RTOS 的专用编程框架支持。我们还保证与 Arduino 库的兼容性。大多数任务都在微控制器外设中处理,如定时器、通信接口、ADC 等,它具有中断和 DMA 通道的强大支持。简而言之,对于具有其他任务的单板计算机来说,这不是一项任务。
另一方面,很显然,现代先进的机器人程序不能仅仅基于微控制器,原因如下:
- 自动机器人需要大量的处理能力来执行导航、图像和声音识别、移动等等,
- 编写先进的软件需要标准化才能有效 - SBC 在行业中越来越受欢迎,而对于为 SBC 编写的软件也是如此,这与 PC 电脑非常相似
- SBC 每年都变得越来越便宜 – Husarion 认为,结合这两个世界在机器人技术方面是非常有益的。
CORE2-ROS 控制器有两种配置:Raspberry Pi 3 或 ASUS Tinker Board。CORE-ROS 运行于 Ubuntu、Husarion 开发和管理工具以及 ROS 软件包上。
下篇文章将介绍为何 Husarion 决定使用 Ubuntu 。
作者:Dominik Nowak 译者:geekpi 校对:wxy